Lucas Chen
I am a Masters student in the CoMMA lab at Purdue University,
advised by Zachary Kingston. I am currently working on learning-based motion planning
and trajectory optimization for realtime (millisecond!) planning.
I'm still sorting out my research interests, which broadly involve designing robotic systems and algorithms
that can make informed adaptations to unseen and ever-changing conditions in the real world. Sometimes, this
involves distilling high level semantic information into executable trajectories and motions.
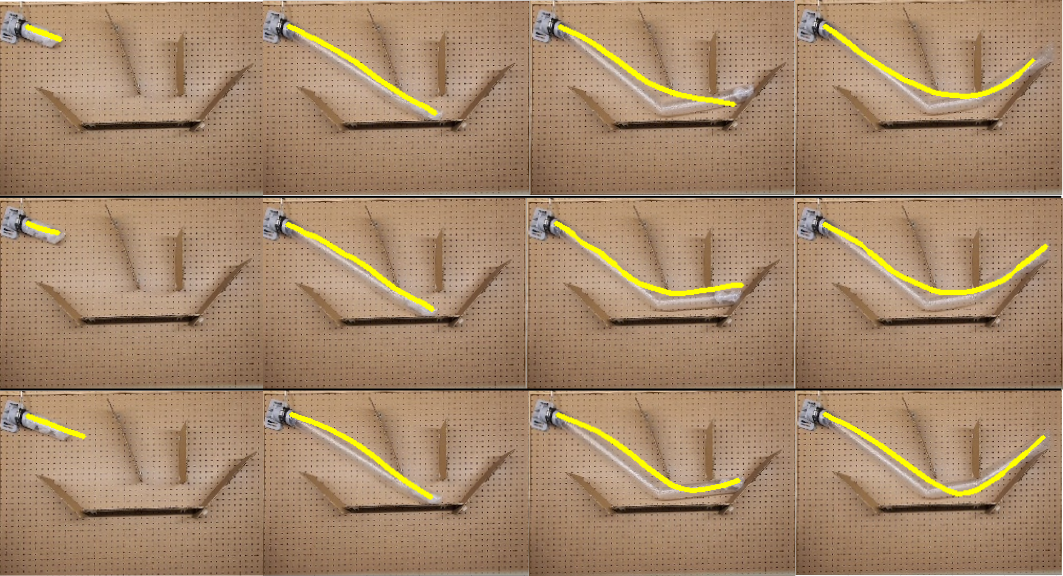
In the past, I have worked on projects spanning kinodynamic motion planning for wacky situations,
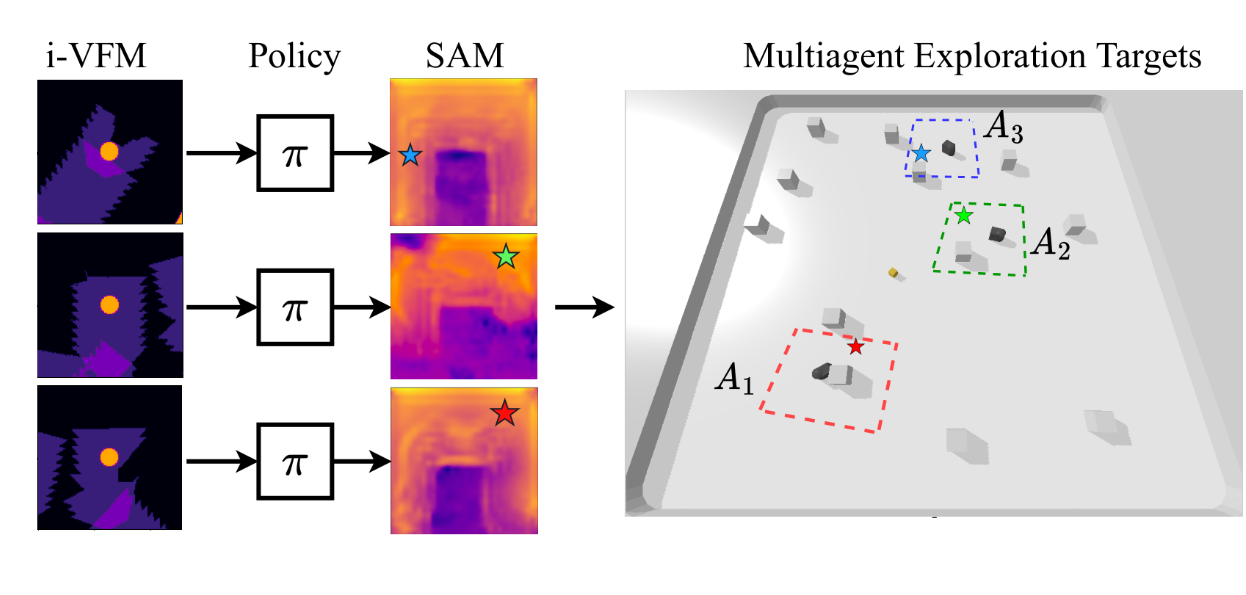
distributed multiagent RL, open language querying, and human-robot interaction/intent modelling.
I am also interested in how we can make proof-of-concept methods from literature reliable and explainable enough to deploy to commercial robots.